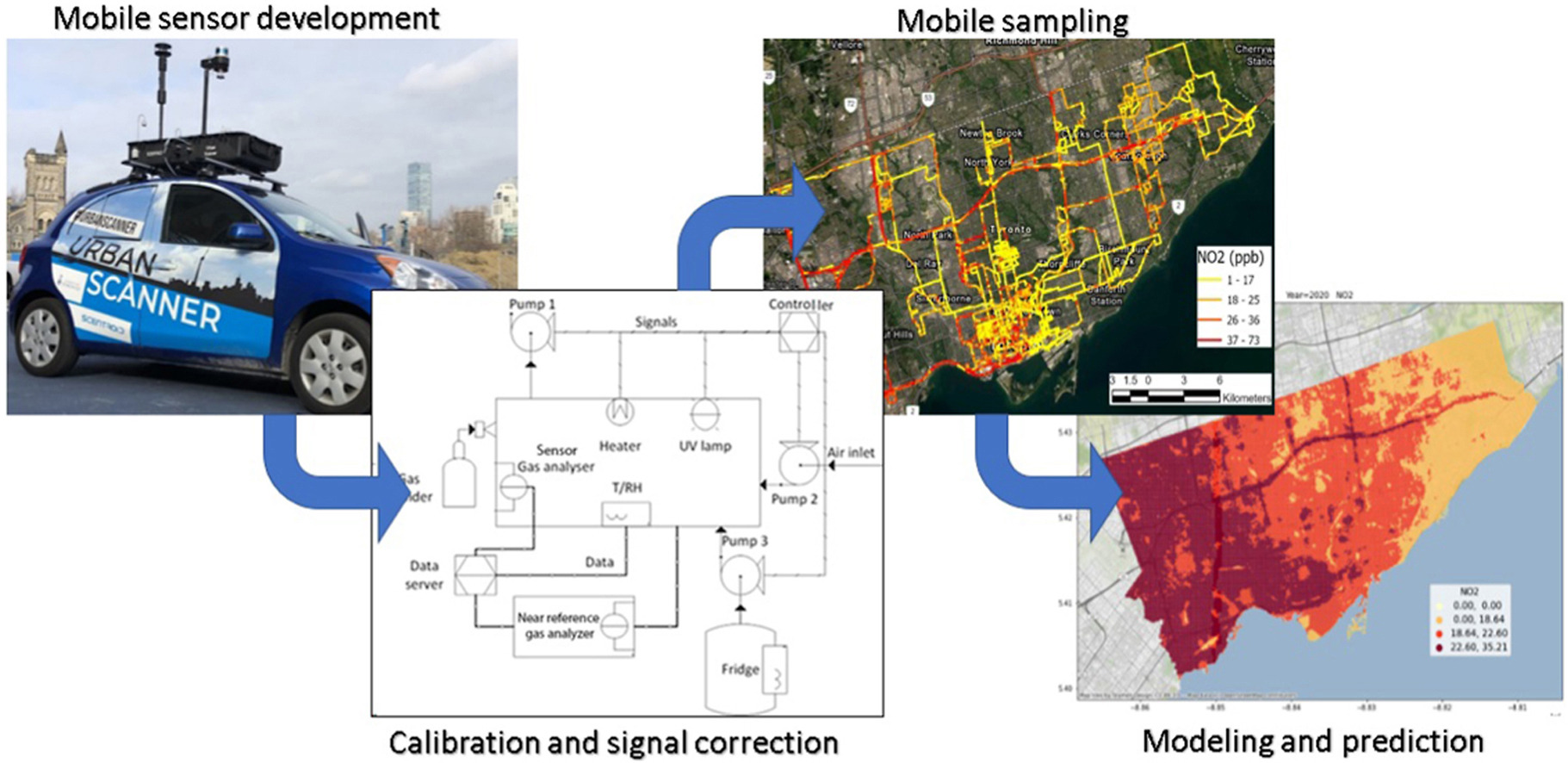
Urban Scanner is an integrated platform that provides high-resolution spatiotemporal air quality information within urban environments. It collects and combines a variety of information such as air pollution concentration, a 3D map of the city, traffic conditions, micro-weather patterns, etc.